ANWENDUNGSBEREICH
Die Umfelderkennung spielt im teil-, und hochautomatisiertem sowie autonomen Fahren eine zentrale Rolle. Bei ständig wachsender Komplexität und heterogenen Sensor-Konfigurationen, müssen ADAS-Architekten korrekte Sensoranforderungen für eine zuverlässige Umfelderkennung identifizieren. Der Multisensor-Perception-Simulator ist ein Tool, das systematisch Sensor-Set-Ups simulieren und diese gegen definierte Szenarien verifizieren kann. PerSim kann problemlos sowohl physische als auch virtuelle und abstrakte Sensoren verarbeiten.
FUNKTIONEN
- Simulation eines Szenarios, basiert auf definierten Ego-Trajektorien und Wegpunkten im 3D-Raum
- 3D-Hindernis-Simulation mit Bounding Boxes: arbeitet mit kategorisierten Objekten und simuliert aktuell ausschließlich statische Hindernisse
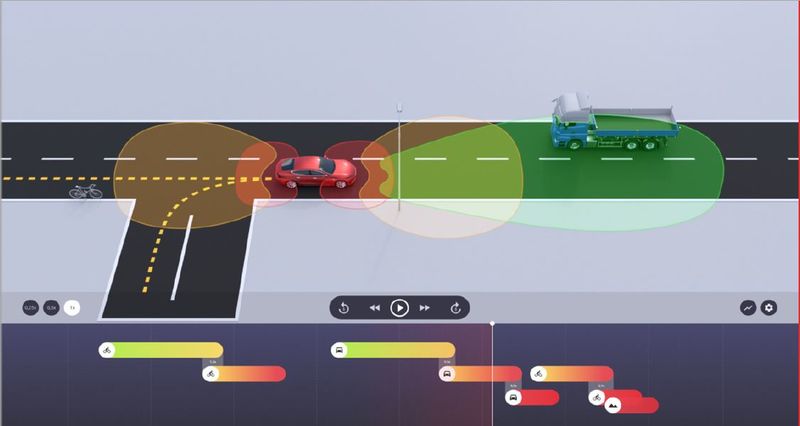
- Visualisieren von Szenen und Anwendungsfällen in einer 2D-Draufsicht
- Simulation des Wahrnehmungsprozesses mit mathematischen 3D Projektionsberechnungen
- Test der Hindernis- und Szenenerfassung, basierend auf 3D-Szenen, aktiven Sensoren und ihren Eigenschaften
VORTEILE
- Identifikation der korrekten Sensoranforderungen zur Umfelderfassung
- Einfache Schnittstellen zur Definition von Sensoren mit zugewiesenen Sensormodellen, inkl. horizontalem und vertikalem Sichtfeld (FOV), Min/Max Reichweite, Radiale und Winkelauflösung, Eigenschaften, Sensorposition und -ausrichtung
SERVICE & INFORMATIONEN
Anfrage & Technischer Support