APPLICATION AREA
For partially automated, highly automated and ultimately autonomous driving the environment perception plays a fundamental role. Dealing with a constantly growing complexity and very heterogeneous sensor setups, ADAS architects have to identify correct sensor requirements for reliable environment detection. Expleo´s multisensor perception simulator is a tool, which can systematically simulate a specific perception sensor setup and verify it against defined scenarios. Our product can easily handle physical as well as virtual and abstract sensors.
FEATURES
- Simulating a scenario based on defined ego-trajectory and waypoints in 3D space
- 3D obstacles simulation with simple bounding-boxes: works with categorized objects and currently simulates only static obstacles
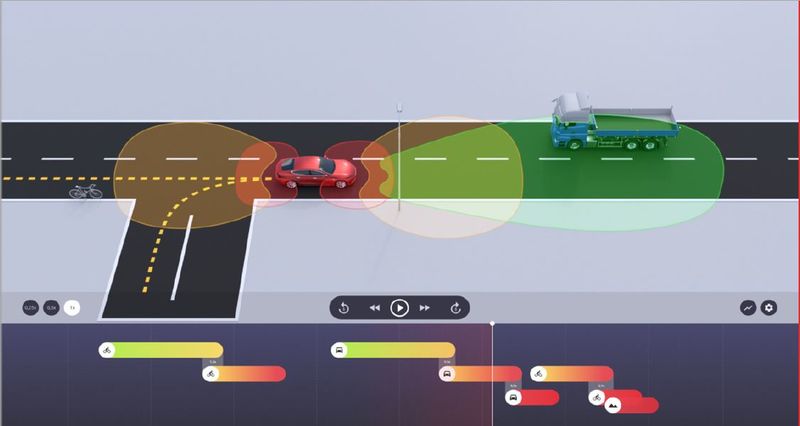
- Visualizing the scene and use cases in a 2D top view
- Perception simulation with mathematical 3D projection calculations
- Verifying obstacle perception, scene perception, based on the 3D scene, active sensors and their properties
BENEFITS
- Identification of correct sensor requirements for environment detection
- Easy interface to define sensors with assigned sensor models, incl. H-FOV, V-FOV, Min/Max Range, Radial and Angular Resolution, properties, sensor position and orientation
SERVICE & INFORMATION
Request & Technical Support